

Прежде чем перейти к анализу и синтезу конкретных систем управления электроприводами остановимся на основных понятиях и параметрах, характеризующих качественные и количественные показатели этих систем.
Замкнутые системы управления электроприводами (СУЭП), как и любые электротехнические устройства, в первую очередь, должны удовлетворять общим технико-экономическим требованиям (надежность, технологичность конструкции, удобство эксплуатации, минимальная стоимость, заданные габариты, масса и др.). Кроме того, к таким системам предъявляется и целый ряд требований, обусловленных в каждом конкретном случае спецификой технологического процесса и режимом работы производственной машины. Среди них важнейшее место занимают требования обеспечения заданных статических и динамических характеристик электропривода. Эти требования в значительной мере определяют выбор структуры СУЭП и ее параметров, что составляет одну из главных задач проектирования автоматизированных электроприводов. Замкнутые СУЭП, функционирующие как автоматические системы регулирования, выполняют с питанием двигателя от управляемого преобразователя. Поэтому их часто называют замкнутыми системами преобразователь – двигатель (П — Д) или, иначе, системами П — Д с обратными связями.
Статическая характеристика замкнутой системы П—Д представляет собой графическое изображение зависимости регулируемой переменной системы от основного возмущающего воздействия f1 двигателя в установившемся режиме при фиксированном значении задающего воздействия g и отсутствии других возмущающих воздействий f2, f3, … . Влияние последних сказывается в виде «дрейфа» статической характеристики или приводит к искажению ее формы. Статическая характеристика может иметь несколько участков разной формы, каждый из которых соответствует определенным структурам или параметрам системы, если они фиксировано изменяются в процессе управления. На рис. 3.6 показана статическая механическая характеристика Ш, типичная для многих замкнутых систем П—Д. Она представляет собой зависимость скорости двигателя ω от развиваемого им момента М при использовании различных регулирующих обратных связей.
На этом же рисунке изображено семейство Р статических механических характеристик разомкнутой системы П – Д. Каждая из этих характеристик отвечает фиксированному значению Xi управляющего сигнала х. Характеристика З состоит из двух участков. На участке 1 действуют обратные связи, стабилизирующие скорость двигателя. Поэтому здесь регулируемая величина у’ = ω’, а момент двигателя можно рассматривать как основное возмущающее воздействие, поскольку в установившемся режиме М’ = М’с. Когда М’ = 0, скорость имеет значение Y’о = ωо‘, а управляющий сигнал х’ — Х’о. При увеличении момента нагрузки под влиянием обратных связей происходит непрерывный переход с одной механической характеристики разомкнутой системы на другую вследствие возрастания управляющего сигнала (характеристики Р при Х’1, Х’2 Х’3, …). Поэтому характеристика З, представляющая собой совокупность точек семейства Р, становится на участке 1 значительно жестче характеристик разомкнутой системы. Перепад скорости на этом участке Δωз = ωо‘ – ω1‘ (т.е. ΔY1 = Yо –Y1) при изменении момента от М’ = 0 до М’ = М1‘ (F1 = Ff (1)) характеризует стабильность регулирования, т.е. точность поддержания постоянства скорости при наличии возмущающего воздействия F1 = М’с.
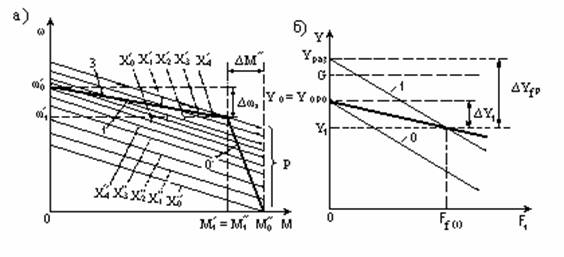
Рис. 3.6. Статические характеристики систем П – Д
При переходе к участку 0 характеристики 3 стабилизирующие скорость обратные связи отключаются и вводится в действие отрицательная обратная связь по моменту, т.е. изменяется структура системы. Последняя теперь будет работать в режиме автоматического регулирования момента двигателя, т.е. здесь у" — М". При этом скорость двигателя представляет собой основное возмущающее воздействие. При неподвижном двигателе <
i>y′′ = Мо′′ и управляющий сигнал х" = XJ. С увеличением скорости, благодаря действию регулирующей обратной связи по моменту, растет сигнал х", принимая последовательные значения Х’1, X′2, X′3, … , что отвечает переходу изображающей точки характеристики З по соответствующим характеристикам семейства Р. Поэтому на участке 0 замкнутой системы значительные изменения скорости сопровождаются относительно небольшими изменениями момента. Перепад момента ΔМ′ = М"о — М"1 (т.е. Δ Yf р = Yраз – Y1) определяет здесь точность поддержания постоянства момента при изменении возмущающего воздействия от ω" = 0 (ft = 0) до ω " = ω 1′ (ft = Ff (1)). Участок 0 предусматривается, например, для ограничения момента двигателя в процессе его пуска, для защиты технологической машины от перегрузки и т.д.
Приведенная на рис. 3.6, а характеристика З отвечает случаю, когда на обоих ее участках система регулирования, изменяя структypy, остается статической системой. Для таких систем иногда пользуются понятием статизма системы, который характеризуется величиной
S = (G-Yi)/G, (3.1)
где G — заданное установившееся значение регулируемой величины; Yi — установившееся значение регулируемой величины, соответствующее неизменному во времени возмущающему воздействию Ff1 (рис. 3.6, б).
Для простоты полагаем, что на вход системы по цепи обратной cвязи подается полная величина Y, где она сравнивается с G.
Статизм S может быть выражен как сумма статизма по заданию Sx, и статизма по возмущению Sf :
S = Sx + Sf = (G -Y0)/G + (Y0 -Y1)/G, (3.2)
гдe Y0 — значение регулируемой величины при F1 = 0.
Вследствие статизма Sg фактическое значение регулируемой величины даже при отсутствии возмущения отличается от заданного на величину G—Y0 (рис. 3.1, б). Статизм Sf обусловливает дополнительное отклонение регулируемой величины от значения Y0. Это отклонение при = F1(1) имеет значение ΔY1 = Y0 — Y1.
Статизм системы зависит от ее параметров, в первую очередь, от коэффициента передачи разомкнутой системы
K = Y0pi / Xi, (3.3)
где Хi и Y0pi — соответственно значения управляющего сигнала и регулируемой величины при f1 = 0 для i -й характеристики разомкнутой системы (предполагается, что величина К остается одной и той же для всех характеристик, также и перепад Δ Y1р для них одинаков). Замкнутая система при f1 = 0 работает на характеристике 0 разомкнутой системы, и Y0 = Y0p0 (рис. 3.1, б). При этом управляющий сигнал Х0 = G – Y0. Учитывая (3.3), можно записать:
Y0 = KG/(1+K). (3.4)
При f1 = F1(1) замкнутая система работает на характеристике 1 разомкнутой системы, для которой Yop1 =Y1 + ΔY1p. При этом управляющий сигнал Xl = G — Y1. С учетом (3.3) находим
Y1 = (КG – ΔY1p) / (1+ K) (3.5)
После подстановки в (3.2) значений Y0 и Y1 из (3.4) и (3.5) получим
S =Sg + Sf = 1/ (1 +K) + ΔY1р/ [G (1 + K)]. (3.6)
Для оценки наклона участка статической характеристики удобнее пользоваться понятием статизма характеристики
Sх = (Y0-Y1) / Yо = ΔY1р/[Y0 (1+K)]. (3.7)
В системах, астатических по возмущению f1 значения Sf и Sx равны нулю.
Таким образом, путем выбора соответствующих обратных связей и значений коэффициента передачи системы, а в необходимых случаях, перехо
дя к использованию астатического регулирования, можно в замкнутых системах П—Д формировать статические характеристики практически любого вида.
Динамические характеристики замкнутых систем П – Д отражают поведение этих систем в переходных процессах пуска, торможения, регулирования скорости, наброса и сброса нагрузки и т.п., т.е. при изменениях задающего или возмущающего воздействия. Эти характеристики представляют собой графики изменения во времени регулируемых величин: ω = f (t), М = q (t), dω/dt = φ (t) и др.
При анализе замкнутых СУЭП (исследовании готовой системы с целью определения ее свойств и путей улучшения их), а также при синтезе таких СУЭП (проектировании системы, удовлетворяющей поставленным требованиям) обычно рассматривают динамику систем в условиях детерминированных внешних воздействий. Чаще всего используют воздействия в виде скачка (ступенчатой функции). На рис. 3.7 изображена типичная кривая изменения регулируемой величины у или ее приращения Δ у в переходном процессе, обусловленном, например, мгновенным приращением Δ G задающего воздействия в момент времени t = 0, т.е. кривая, характеризующая реакцию системы на скачок Δ G (l-0). Предполагается, что при t < 0 система работала в установившемся режиме. При Δ G = 1 кривую у (t) называют переходной характеристикой или переходной функцией и обозначают ее hg (t). Аналогично при скачке возмущающего воздействия Δ F= l (t) для случая, когда Δ F = 1, получается переходная функция hf (t).
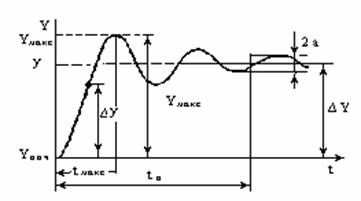
Рис. 3.7. Кривая переходного процесса
Оценка качества системы по виду кривой переходного процесса производится при помощи так называемых прямых показателей качества (быстродействия, перерегулирования, числа колебаний).
Быстродействие системы или продолжительность переходного процесса определяется промежутком времени tп , по истечении которого выполняется неравенство
(y (t) — Y)/(Y – Yнач) = Δ y (t) – Δ У < 2а,
где у (t), Yнач и Y — соответственно текущее, начальное и установившееся значения регулируемой величины; Δ y (t) и Δ Y — приращения регулируемой величины и ее установившегося значения; а — наперед заданное число.
Обычно принимают а = 0,03 — 0,05, т.е. переходный процесс считают закончившимся, когда Δ y (t) отличается от своего установившегося значения Δ Y не более чем на 3 – 5%.
В электроприводах, работающих главным образом в режимах пуска и торможения, увеличение быстродействия необходимо для повышения производительности технологических машин. В системах следящего и программного управления сокращение времени переходных процессов способствует повышению точности отработки линейных и угловых перемещений. В системах стабилизации скорости повышение быстродействия снижает динамические ошибки при набросе и сбросе нагрузки. Вместе с тем увеличение быстродействия имеет свои пределы, определяемые в каждом конкретном случае с учетом ограничений электрической и механической части электропривода (перегрузочная способность двигателей; допустимая по условиям коммутации на коллекторе скорость нарастания тока; величины ускорений и ударов, допускаемые конструкцией механизма и т.п.).
Перерегулированием σ называют в общем случае отношение разности между приращениями максимального и установившегося значений регулируемой величины к приращению ее установившегося значения. Перерегулирование обычно выражают в процентах:
σ = [(Yмакс— Y)/ Δ У] 100 = [(Δ Yмакс — Δ Y)/ Δ Y] 100,
где Yмакс и Δ Yмакс — максимальные значения регулируемой величины и ее приращения в переходном процессе.
Перерегулирование не должно превышать заранее заданного значения. Допустимое перерегулирование определяется требованиями технологического процесса и обычно не превышает 18—30%. В некоторых случаях перерегулирование вообще должно отсутствовать. В свою очередь, максимальное значение Yмакс также может быть ограниченным. Например, при пуске или торможении привода с двигателем постоянного тока максимально допустимое значение тока якоря двигателя определяется усло
виями коммутации на коллекторе. По этой же причине ограничивается максимальное напряжение на якоре и верхний предел скорости двигателя.
Чис
ло колебаний регулируемой величины за время t п, т. е. число переходов этой величины через установившееся значение, определяет cтепень демпфирования (затухания) колебаний в системе. Как правило, допустимое число колебаний принимают меньше трех. Накладываются ограничения и на частоту колебаний, чтобы избежать возникновения резонансных явлений в системе электропривода.
Для линейной системы, располагая, например, ее переходной функцией hg (t) или зависимостью у (t) = Ghg (t), можно легко получить кривую переходного процесса при линейном изменении g, т.е. найти реакцию системы h (t ) на воздействие вида G = 1 (t).
Для систем, работающих в основном в режимах пуска и торможения, графики переходных процессов стремятся сформировать приближающимися к виду, показанному на рис. 3.8 (взят случай пуска при Мс = 0). Диаграмма момента двигателя М = f (t) здесь имеет форму трапеции. Минимальное время переходного процесса t п. мин обеспечивается при Ммакс = Mдоп с учетом ограничения производной dM/dt допустимым значением. Такая диаграмма формируется различными способами, в том числе и использованием линейных законов изменения задающего воздействия.
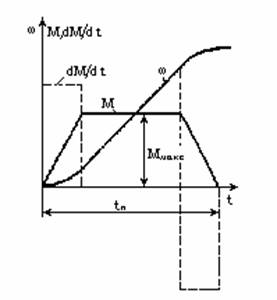
Рис. 3.8. Диаграмма оптимального переходного процесса

